Source: businessinsider.my
- A group of Google researchers have built a robot capable of learning to walk by itself with minimal human intervention.
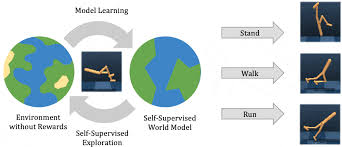
- The researchers used a kind of AI called deep reinforcement learning to enable the robot to learn how to walk by trial-and-error.
- The robot learned to walk on a variety of surfaces, including a squishy mattress and a doormat full of crevices.
- Visit Business Insider’s homepage for more stories.
There’s now a robot with the walking capabilities of Bambi, which is more impressive than it sounds.
Researchers at Google, the Georgia Institute of Technology, and UC Berkeley published a paper this week detailing how they successfully built a robot which used AI to teach itself how to walk.
The robot uses a kind of AI called deep reinforcement learning. Deep reinforcement learning combines aspects from two different kinds of AI, deep learning and reinforcement learning. With reinforcement learning, an algorithm learns how to perform a task through trial-and-error, where it receives rewards and punishments depending on how close to achieving its task it gets. Deep learning allows systems to process and evaluate raw input data from their environments.
Normally tests of reinforcement learning algorithms are performed within simulated computer environments, so the researchers’ work marks a step forward into the real world.
The researchers started the robot out on a flat surface, where it figured out how to walk within 1.5 hours. Next they tested it out on some slightly more challenging surfaces – a squishy memory-foam mattress and a doormat with lots of crevices. The robot took 5.5 hours to figure out walking backwards and forwards on the mattress, while the doormat only took 4.5 hours.
The robot was not entirely bereft of human supervision, since researchers still had to intervene when the robot accidentally left the space it was meant to learning in, and when it fell over – although they were able to tweak its algorithm to stop it wandering out of the space. As well as manually stepping in to help the robot, the researchers tweaked its algorithm to stop it wandering off and help it stand up when it fell over.
Researcher Jie Tan told the MIT Tech Review that building robots capable of effective walking is the future of robotics. “A lot of places are built for humans, and we all have legs […] If a robot cannot use legs, they cannot navigate the human world,” he said.