Source: techxplore.com
The field of robotics took one step forward—followed by another, then several more—when a robot called Rainbow Dash recently taught itself to walk. The four-legged machine only required a few hours to learn to walk backward and forward, and turn right and left while doing so.
Researchers from Google, UC Berkeley and the Georgia Institute of Technology published a paper on the ArXiv preprint server describing a statistical AI technique known as deep reinforcement learning they used to produce this accomplishment, which is significant for several reasons.
Most reinforcement learning deployments take place in computer-simulated environments. Rainbow Dash, however, used this technology to learn to walk in an actual physical environment.
Moreover, it was able to do so without a dedicated teaching mechanism, such as human instructors or labeled training data. Finally, Rainbow Dash succeeded in walking on multiple surfaces, including a soft foam mattress and a doormat with fairly notable recesses.
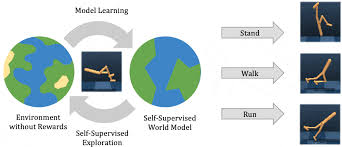
The deep reinforcement learning techniques the robot used comprise a type of machine learning in which an agent interacts with an environment to learn by trial and error. Most reinforcement learning use cases involve computerized games in which digital agents learn how to play to win.
This form of machine learning is markedly different from traditional supervised or unsupervised learning, in which machine learning models require labeled training data to learn. Deep reinforcement learning combines reinforcement learning approaches with deep learning, in which the scale of traditional machine learning is greatly expanded with massive computational power.
Although the research team credited Rainbow Dash with learning to walk itself, human intervention still played a substantial role in achieving that goal. Researchers had to create boundaries within which the robot learned to walk in order to keep it from leaving the area.
They also had to devise specific algorithms to prevent the robot from falling down, some of which focused on constraining the robot’s movement. To prevent accidents such as falling damage, robotics reinforcement learning usually takes place in a digital environment before algorithms are transferred to a physical robot in order to preserve its safety.
Rainbow Dash’s triumph takes place approximately a year after researchers initially figured out how to get robots to learn in physical, as opposed to virtual, surroundings.
Chelsea Finn, a Stanford assistant professor associated with Google who didn’t participate in the research, says, “Removing the person from the [learning] process is really hard. By allowing robots to learn more autonomously, robots are closer to being able to learn in the real world that we live.”