Source: factorynet.at
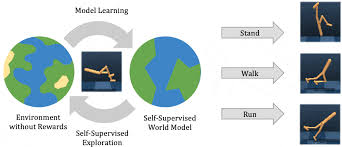
The partners in the “Rob-aKademI” research project, including the Fraunhofer IPA and the Institute for Industrial Manufacturing and Factory Operation IFF at the University of Stuttgart, are developing technologies that are intended to simplify robot programming for assembly tasks and automate them more. The basis for this is a purely digital image, i.e. a digital twin, of the production environment. This image, combined with a special programming framework, is used in a physical simulation environment so that robots learn skills for flexible assembly. They explore their surroundings autonomously in the simulation environment, plan their behavior based on them and optimize it independently or learn continuously.
Three practical use cases
Artificial intelligence and more precisely machine learning and its sub-area of so-called “reinforcement learning” (RL) is used for this. This means that an algorithm similar to humans learns on the principle of trial and error. He receives a reward signal for a successful action in order to gradually improve. The project creates three application-related learning modules that encapsulate the expert knowledge of robot programming and the assembly operation to be carried out: the “perception module” for object detection, the “force-controlled joining” learning module for robust joining strategies and the “snap connections” learning module with a detailed physical joining model. These technologies are used to create robust robot programs for transferring the simulation results into reality. The project partners validate their results with the help of three practice-oriented applications, the assembly of switch cabinets, switches and printed circuit boards. The modules for force-controlled joining and snap connections are based on the already available IPA software “pitasc” for force-controlled assembly tasks and will expand their capabilities.
Personalized production
With its project goals, “Rob-aKademI” particularly addresses the needs of increasingly personalized production. Assembly applications currently place high demands on robot programming. These include diverse and at the same time demanding, often force-controlled processes, a large number of variants and short cycle times. For many companies and especially small and medium-sized companies with their customer-specific products, it is often not worth using robots for assembly, especially since only an expert can do the programming. Robots offer advantages such as taking on non-ergonomic, dangerous or monotonous activities and consistent quality in the execution of tasks. They can also be a decisive competitive factor, especially in high-wage countries like Germany.